Today we will explore an interesting question: the use of hands in virtual reality. This article is based on Jakob Johansson (CEO Gleechi) and Kai Hubner, PhD (CTO Gleechi) in the VRDC lecture.
First of all, please please clench your fists and think about how inconvenient it is to have no hands. We can't open books, we can't grab cups, we can't play instruments, we can't beat our friends, and so on. Flexible hands bring so much convenience to life and are an integral part of life. Gleechi has been working on robots for 8 years. Until the VR market opens, Gleechi finds that there are too many similarities between robots and characters in virtual reality. How do you grab objects and interact with objects? The key issues in robot research have also become issues that need to be solved in the VR field.
Nowadays, many virtual reality games have great problems with the operation of the hand, such as the object jumping directly to the virtual hand, the virtual hand passing through the item, or when using the invisible virtual hand, we can only see the object floating in the object. In the air. The reason for this is because the structure of the human hand is very complicated, especially when people try to interact with objects and things, things become more complicated. Below we will talk specifically about how to solve these problems in VR development.
in history. The world's first robot was invented by devol & Engelberger, Unimate (1960). This robot has a degree of freedom of 1DOF (degree of freedom) and can only grab items in one dimension. However, the development of robots now is closer to the hands of the real world. We will talk about the development of robots and virtual hands based on the following three aspects:
1. Hand Design & Input:
On this topic, we will introduce two aspects of performance and flexibility, as shown below:
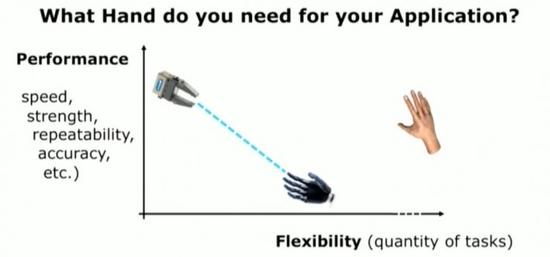
High-performance hand: Used frequently in the factory, it is fast, powerful, accurate and suitable for repetitive work.
Highly flexible hand: more interaction with different objects, but performance may be poor.
Manpower: In a neutral position.
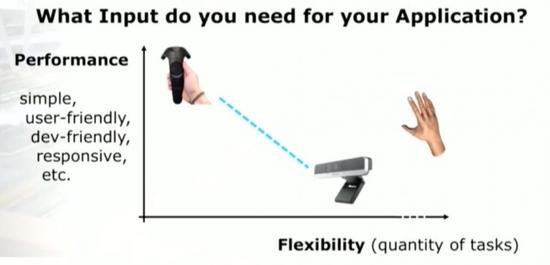
So in application development, how do we choose an input device? This problem can also be answered by both performance and flexibility. A high-performance motion controller provides friendly operation, and users only need to press a simple button to complete the task. However, for complex finger tracking, we prefer to choose a camera with high flexibility.
2, object interaction (object interaction):
Objects are an important part of the interaction, and objects determine how the hands interact. Speaking of this problem, we first introduce a simple concept of affordance: the relationship between the environment and the organism, through a series of stimuli, to provide an opportunity for the organism to perform actions. For example, if the robot sees a pot handle, he will interact with the handle and lift the pot. If you see a wheel, he will want to rotate it. If it is an axe, he will want to lift it.
3. Grab Taxonomies:
We classify different crawls as shown below:
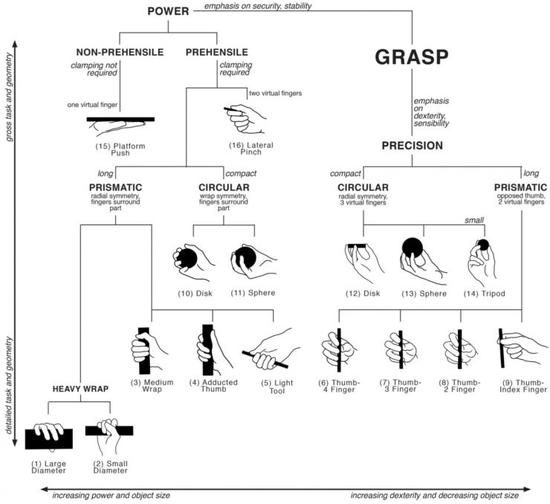
Power grasp and precision grasp. Depending on the item and you will be doing something different on the object, such as holding a ball or holding a pen. We determine how to crawl in terms of availability, tools and classification. An interesting study by Aaron M. Dollar two years ago, he observed the daily hand operations of a maid and a mechanical engineer and found that more than 50% of the operations of the two focused on three kinds of grabbing actions, but the commission The power grab rate is greater than the precision grab, and the engineer is the opposite.
So what should we do in the game development below?

We can see that there are various items in the scene, we need to use force to grab to get a heavy object such as the iron pot in the picture, and grab a smaller fork, we use precision to grab.
After understanding the concept, we began to focus on the virtual Grasp. We focus on how to make virtual hands closer to natural hand operations in the VR world, we will:
Representation of hands.
Object interaction.
Input (Input).
Three aspects of the details talk about virtual hands.
1. Avoid the uncanny valley: The horror valley theory is a hypothesis about human perceptions of robots and non-human objects. It was proposed in 1969, which shows when robots resemble humans to a certain extent. Human response to them suddenly becomes extremely repugnant, that is, even if the robot and humans have a little difference, it will be very conspicuous, so that the whole robot has a very stiff and terrifying feeling, like facing the walking dead. If we use a pair of virtual hands that are very similar to human hands in VR games, but the behavior of virtual hands is not natural, then users will feel scared and uncomfortable.
2. Avoid empty hand personalities, such as large or small virtual hands. Or a pair of natural virtual hands, but the skin color is different from the user.
3. Be consistent: Regarding the consistency of the virtual hand, for example, when we choose the model that is closest to the real human hand in the application, we hope that the effect of the interaction is the most natural. When we interact with the model of the robot, the object may jump to the virtual hand. An invisible hand may be a good way to solve the problem of virtual hands and objects crossing. The cartoon hand will disappear when it grabs the object. We can also let the virtual hand take a tool to interact.
For example, the following table shows:
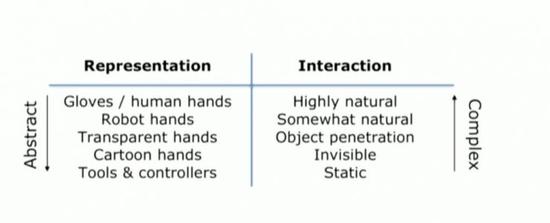
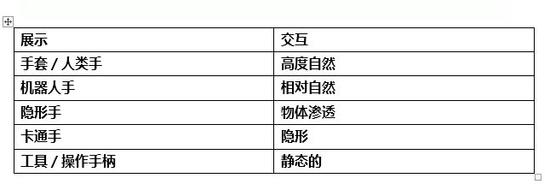
From the top to the bottom of the table, the display of the hand is more and more abstract. The table below shows that as the abstraction of the hand is enhanced, the complexity of the interaction is reduced.
4. Skip the arms: Because the arm will float a lot in the virtual scene, affecting the overall effect.
Think about the object in the scene (think long and hard about every object in the scene): Let the items in the scene interact with the virtual hand as much as possible.
6. Make is obvious how to interact with object: Do not make a lot of complicated operations on an item, so development will become more complicated.
7. Pick the most natural grasps: Think about what people want to do with objects in a virtual environment, such as a cup, we will use it to drink water, put him in the dishwasher, and put it Falling on the ground.. wait. In addition, as we mentioned before, there are many kinds of grabbing operations, different objects, different purposes, and different methods of grabbing.
8. According to the use of the case controller (choose controller based on the use case): As we talked about before, the motion controller is easier to use in the game, the user does not have to think too much, just press the button . When we use body language, finger tracking is especially important.
9. Use feedback: Tells the user that he successfully picked up the item, such as using a sound, or visually feeling that the object was picked up, or highlighting the item being manipulated.
10, sometimes the hands of the feedback will be strange (Some times hands and feedback gets weird): Sometimes the player can not predict the operation of the object, may get strange feedback.
Summary: The operation of virtual hands is an important part of VR development. I hope that everyone can have a deeper understanding of virtual hands through this article, and have a more accurate grasp of the choice of virtual hands in the application.
Our bathroom storage collection organizes your essentials, so everyone can calmly find what they are looking for even during the hectic morning rush hour. Our versatile selection features options for bathrooms of every size and design including everything from linen cabinets to shelf units, storage mirrors to bathroom carts. Just take some measurements and browse through our full supply to find the best fit for your space, all at our signature low affordable prices.
Bathroom Storage Cabinets,Bathroom Storage Tower,Freestanding Bathroom Cabinet,Tall Bathroom Storage Cabinet
HOPE IKEA , https://www.skywardrobes.com